

Ever wondered how a service robot can navigate effectively around a room full of furniture and people without stumbling on them or causing havoc? Or how autonomous vehicles determine their positioning and mapping on freeways without causing accidents? Either way, each of these technologies needs a navigation system to detect objects in their surroundings, positioning, and mapping for appropriate action.
To facilitate the process of figuring out where a robot is, its navigation system is complemented with the Global Positioning System (GPS) and the inertial measurement unit (IMU), but only where the GPS signal is strong. The problem arises when a robot finds itself in an environment where the GPS signal is either weak or not available. That is where the SLAM (simultaneous localization and mapping) system comes in, especially the LIDAR SLAM technology for precision.
Simultaneous Localization and Mapping (SLAM)

Robotics is an engineering discipline that has gained application across various industries. The use of robots and automation has enhanced the quality of human life since many tasks can be performed conveniently without lifting a finger. Surrounding scene perception, object detection, mapping and positioning, and the ability to swiftly take appropriate action are critical areas of concern at the heart of the development of robotic technology.
As mentioned earlier, another critical area of robotic technology is the Simultaneous Localization and Mapping (SLAM) technology. The effectiveness and survival of a self-driving car or a service robot whose navigation system lacks SLAM technology are limited. SLAM is key to a robot’s operational efficiency, whether outdoors or indoors.
An autonomous car developer’s biggest challenge is equipping a self-driving car with the navigation technology that enables it to map its environment and figure out its position within that surrounding with high precision.
How does the SLAM technology work?
First, when the SLAM system is activated in a robot, the installed sensor’s initial task is to understand the surrounding environment by scanning and detecting objects in the vicinity. This data gathering process enables the SLAM system to determine its location within that environment. A map of the robot’s location is then designed, which is compared against real-time data of the surrounding scene. The last details of the robot’s location and the current details are adjusted accordingly to complete the mapping and location-determination exercise.
From the above description of how SLAM technology operates, it’s thus clear that mapping and positioning are crucial in enabling a robot to figure out the environment it’s placed in and its exact location within that environment. Moreover, those two SLAM technology tasks apply not only to service robots and autonomous driving cars but also to Augmented Reality devices and sweeping robots.
The most common SLAM systems
SLAM systems are broadly categorized based on the type of sensors used in environmental scanning. The two SLAM systems include:
- Visual SLAM
That is the type of SLAM technology that uses cameras exclusively in sensing the environment.

- LIDAR-based SLAM
That is the type of SLAM technology that uses LIDAR laser sensors to scan and detect objects in the environment.
But for this article, our primary focus is the LIDAR-based SLAM system.
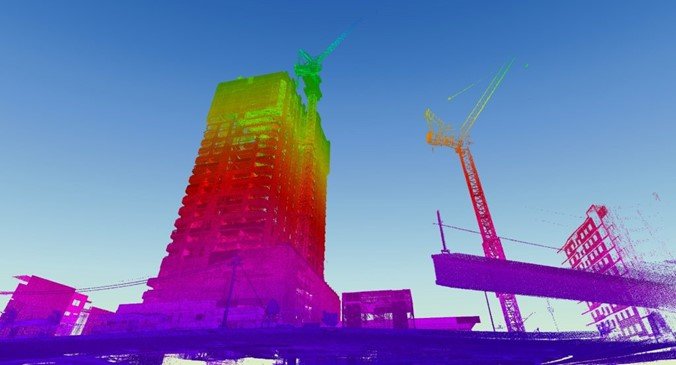
What is a real-time LIDAR-based SLAM library?
That is a LIDAR-based SLAM software-driven by LIDAR sensors to scan a scene and detect objects and determine the object’s distance from the sensor. Unlike the visual SLAM system, the information gathered using the real-time LIDAR-based SLAM technology is high object dimensional precision.
How does the real-time LIDAR-based SLAM library work?
Just like any other type of LIDAR technology, the real-time LIDAR-based SLAM library works by illuminating a beam of laser light towards surrounding objects, and the pulse’s time of flight is utilized to calculate the distance between the pulse source and the target objects as well as the position of these objects in the environment.
Considering the lightning speed of light in the air, determining the distance between scene objects and the robot is super-fast and accurate. It’s this level of LIDAR performance that makes this approach superior over visual SLAM. However, the real-time LIDAR-based SLAM approach is more expensive than its counterpart because of the high speed and precision level.
Whereas LIDAR SLAM library technology captures high precision data, the accuracy is limited to the shape and form of surrounding objects. Situations where there is a high level of object obstruction, and some objects have to change shapes can undermine accuracy levels of object data collected.
Inertial Measurement Unit (IMU)
Whereas the real-time LIDAR-based SLAM library technology and the Inertial Measurement Unit have both been proven to work independently effectively, an integration of both technologies can give rise to a more robust system with even higher data processing speeds and greater precision.
For example, a sweeping robot can exploit the advantages of having both LIDAR SLAM technology and Inertial Measurement Unit integrated into its navigation system to consistently clean and gather scene details to construct a map of the surrounding environment and figure out its location.
The sweeping robot can combine both scene mapping and positioning information to accurately and consistently differentiate between cleanroom areas and those that still require cleaning. Therefore, through a combination of both LIDAR SLAM and Inertial Measurement Unit technologies, the autonomous movement of a robot can be achieved because of consistency in environmental scanning and scene understanding and high precision in object data gathered.
Advantages of real-time LIDAR SLAM library
- This robot positioning and mapping approach are practical even in areas where GPS signal is weak or unavailable, mostly indoors.
- The application of LIDAR SLAM technology is easy and convenient due to the laser sensors’ small size.
- The accuracy and speed of object distance data collected are very high, making this LIDAR SLAM system a real-time suitable approach.
Disadvantages of real-time LIDAR SLAM library
- This approach is quite an expensive one compared to visual SLAM that exclusively involves cameras in scene understanding.
- LIDAR SLAM system doesn’t capture more of the surrounding scene than its counterpart does.
The bottom line
In conclusion, the evolution in robotic technology over the past decade has created a need for robots and autonomous driving vehicles that have a navigation system where real-time LIDAR SLAM library technology is installed, especially those operating in areas where GPS signals are frequently interrupted or unavailable at all.
Besides, this system’s ability to use laser light pulses to collect information on the robot’s positioning and mapping and object distance makes it a robust solution in autonomous movement. Lastly, despite all the advantages of real-time LIDAR SLAM, it is quite costly compared to visual SLAM that utilizes cameras.


